
3月のスマ農トピック①―農研機構発!トマト栽培を支える「下葉処理」ロボット―
ポイント
農研機構は、トマトの下葉処理を自動で行うロボットを開発しました。農研機構では、この下葉処理ロボットの技術を基盤に、複数の作業に対応できるマルチユースロボット(1台で何役も担えるロボット)への発展を目指しています。現在、開発や社会実装を共に進めるパートナーも募集しています。
なぜ下葉処理を自動化するのか?
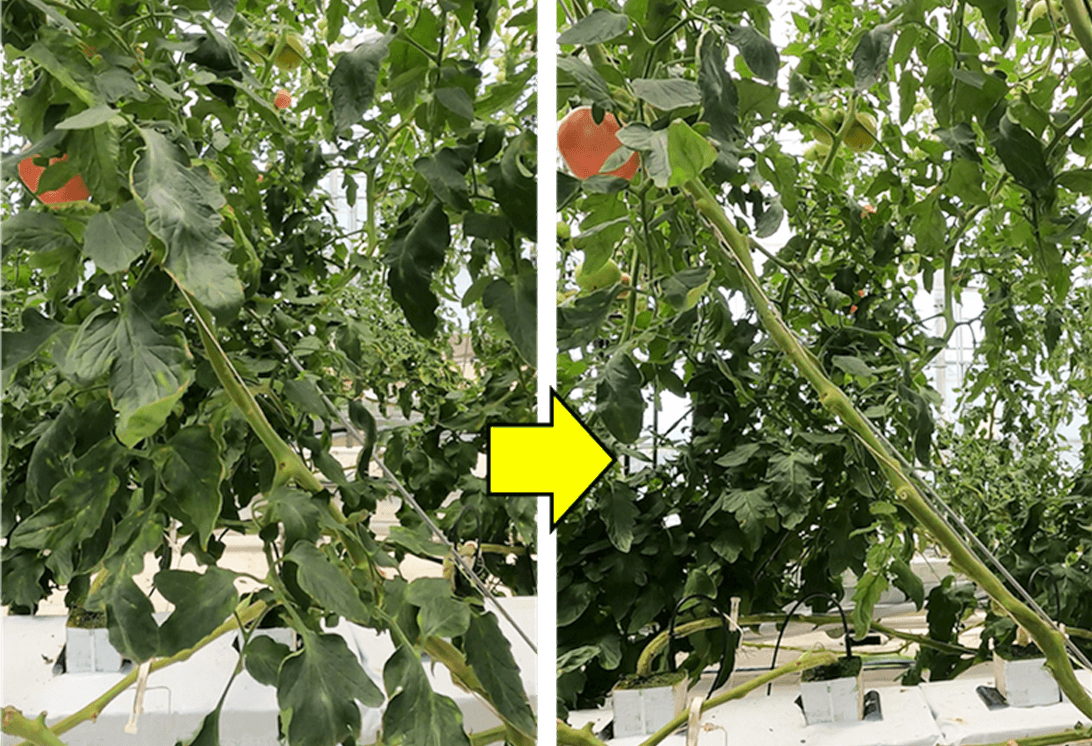
トマト栽培における下葉処理は、株元の風通しを確保して病害虫の発生を抑えるとともに、収穫や農薬散布などの作業を円滑に進めるために欠かせない管理作業です。しかし、中腰で長時間作業を繰り返すこの工程は、農家にとって身体的にも時間的にも大きな負担です。また、農業従事者の高齢化や人件費の上昇も重なり、労働力の確保が年々難しさを増しています。
開発された本ロボットは、現時点では1株あたり66秒で下葉処理を行い、約72%を切除できることを確認しています。現在は、処理速度や切除率のさらなる向上に向けた改良を進めています。また本ロボットは、収穫など他の作業の自動化とも連携しやすい設計となっています。将来的には、人件費や作業時間など、総コストの約3割を占める施設園芸の労働負担の軽減が期待されています。

開発におけるハードルは?
下葉処理に限ったことではありませんが、農業におけるロボットを実用化するうえで最大の課題は、作物の状態が一様ではないことです。トマトも株ごとに葉の位置や垂れ方が異なり、主茎の曲がり具合も一定ではありません。工場のように形状や位置が揃った対象を扱うのとは大きく異なり、「同じ動きを繰り返すだけ」ではうまくいきません。
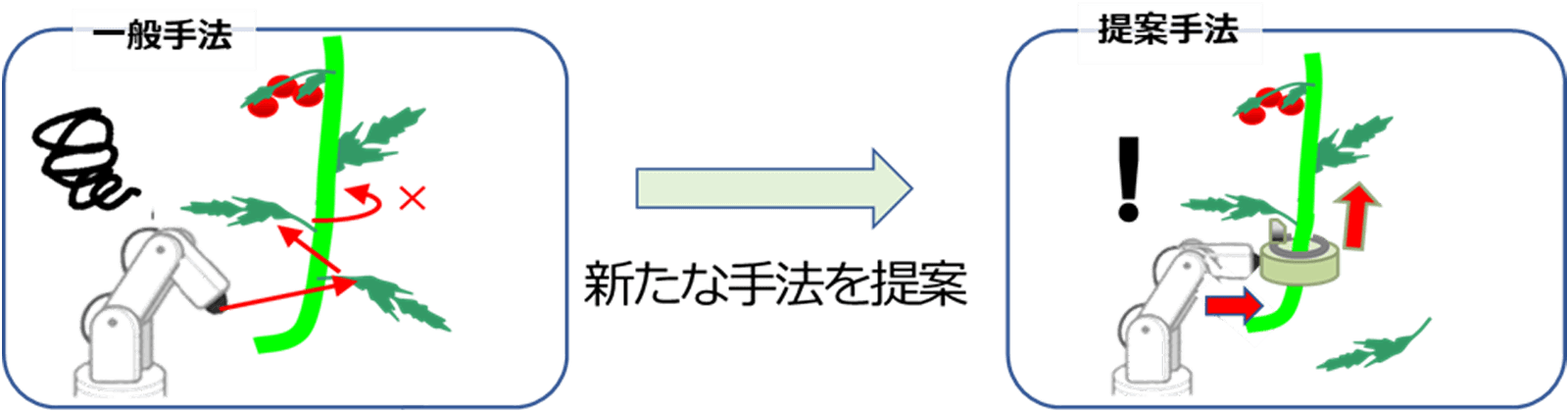
従来の作業ロボットの方式では、「対象である葉を1枚ずつ正確に認識し、その位置を特定して切る」というものが主流でした。しかし、葉が密集している場合には視界が遮られ、認識に時間がかかるうえ、処理速度や作業性能にも限界がありました。実用化が進まなかった大きな理由のひとつです。
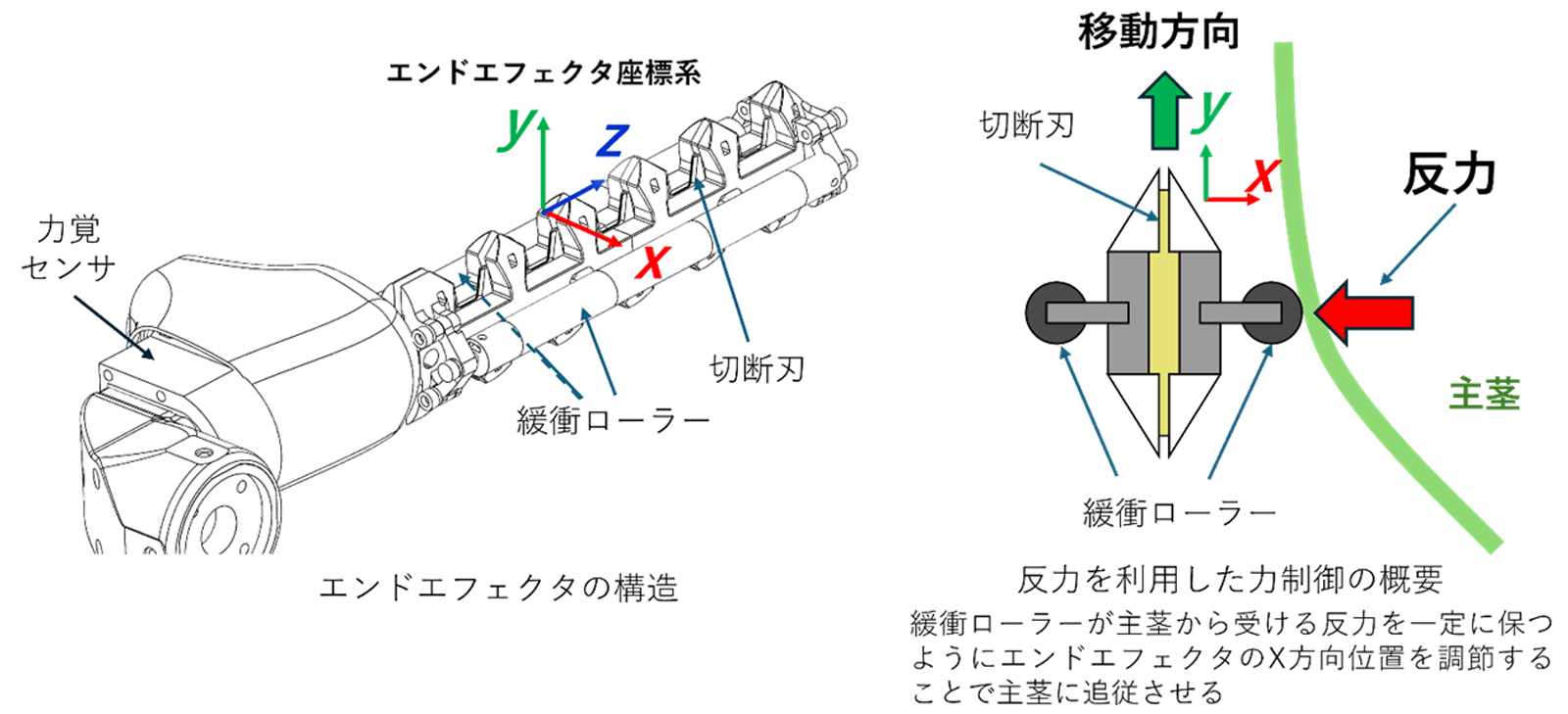
そこで本ロボットでは発想を転換し、「葉を正確に特定して作業する」のではなく、「主茎を動作の基準(ガイド)として作業する」という考え方を採用しました。主茎に沿ってバリカン型の刃を動かすことで、葉柄の位置を個別に特定しなくても複数の葉をまとめて切除できます。さらに、刃が主茎に触れたときに生じる反力を力覚センサで検知し、その力が一定になるようロボットアームの動きを調整する力フィードバック制御を導入しました。これにより、主茎の曲がりや株ごとの個体差に柔軟に追従しながら、安定して下葉処理を行うことが可能になりました。また、主茎を誤って切断することもありません。
トマトが全自動で栽培できる未来も近い?
農研機構は、1台で複数の作業を担える「マルチユースロボット」の開発を目指しています。今回開発した下葉処理ロボットを基盤に、収穫など他の作業の自動化技術とも連携できる仕組みを構築することで、トマト栽培における作業時間の大幅な削減が期待されます。下葉処理と収穫作業を組み合わせることができれば、全作業時間の約40%削減につながる可能性があります。将来的には、トマト以外の作目への展開も期待されています。
ロボットによって単純・重労働な作業が省力化されれば、農業者はより高度な判断が求められる品質管理や栽培戦略、経営改善といった業務に集中できるようになります。農研機構は今後も、AIやロボット技術を活用し、これからの農業現場を支える技術開発を進めていきます。
参考
(研究成果) トマトの下葉処理を自動化するロボットを開発 | プレスリリース・広報
画像出典
農研機構