
6月のスマ農トピック③―除草・草刈り作業のスマート技術の開発・普及への期待―
本コラムは、長年にわたり除草ロボットや草刈り作業の省力化技術の研究開発に携わってこられた農研機構の亀井雅浩さんに、除草・草刈り技術開発の歩みとその変遷についてご紹介いただきました。
これまでの研究を振り返りながら、現場の課題と向き合ってきたご経験をもとに、技術の進展とその意義、そしてこれからのスマート農業の可能性について語っていただきました。
はじめに
農業現場において、除草や草刈りは生産を支える重要な管理作業ですが、労働負担が大きく、事故の危険も伴います。特に中山間地域では畦畔法面の草刈りが重労働となっており、担い手の減少や高齢化が進む中で、農業経営の継続において大きな課題となっています。
本コラムでは、私が取り組んできた除草ロボット開発研究や草刈り作業の軽労化技術開発を振り返り、近年の技術開発の状況を踏まえて、今後のスマート農業技術の開発・普及への期待を述べます。
永年草地における除草ロボットの開発研究(1993年度〜)
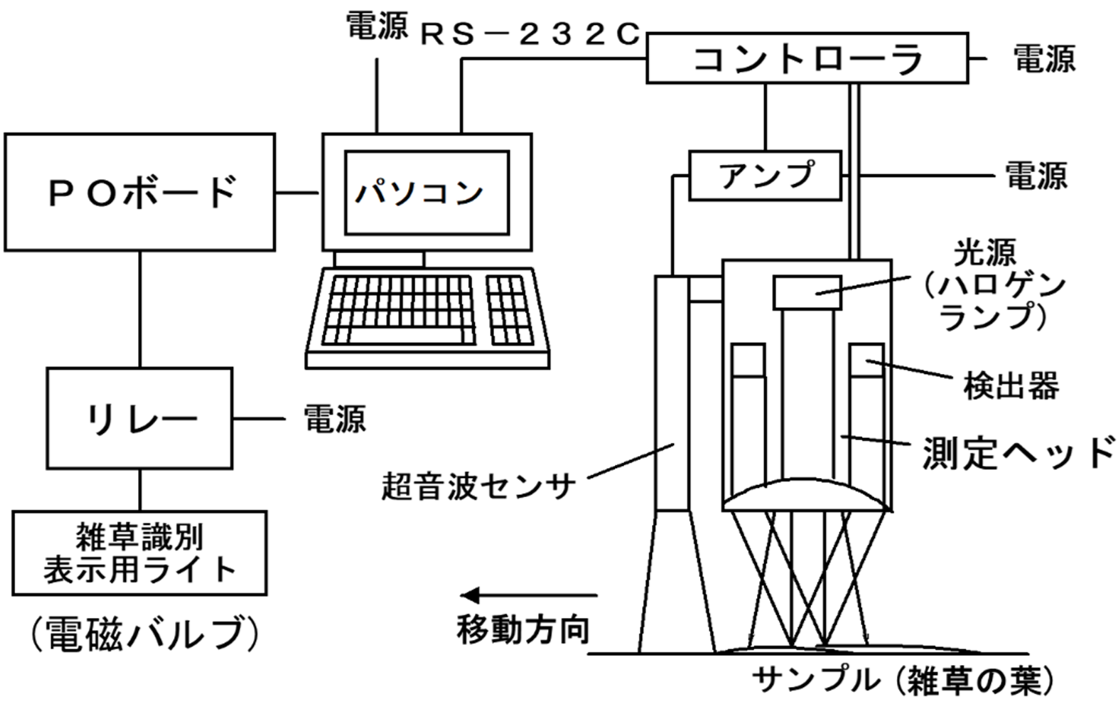
私が最初に取り組んだ除草技術の開発研究は、生研機構(現・農研機構 農業機械研究部門)において、1993年度から5年間実施された民間企業との共同研究「永年草地における除草ロボットの開発」です。永年草地内に点在する雑草(エゾノギシギシ)を分光反射率の違いから自動識別し、除草剤をスポット処理するトラクタ牽引式除草ロボットを試作しました(図)。当時は現在のようなセンサー技術や情報通信技術が十分ではなく、また雑草・牧草研究分野との連携不足等もあり、実用化には多くの課題が残りました。しかし、10数年後には海外で畑雑草用スポットスプレーヤが市販化されるなど、本取り組みは現在のスマート農業にもつながる先駆的な研究であったと考えています。
急傾斜法面における草刈り作業技術の開発研究(1997年度〜)
1997年度からは、中国農業試験場(現・農研機構 西日本農業研究センター)において、中山間地域の急傾斜法面における省力草刈り作業技術の開発研究に取り組みました。当時普及していた刈払機や斜面草刈機による作業の能率や労働負担を把握し、「作業者を法面に立ち入らせない」という安全性を第一のコンセプトとして、ロープ牽引式草刈機や懸垂式草刈機(親子式草刈機)を開発しました。開発当時は民間企業との連携が十分ではなく実用化には至りませんでしたが、親子式草刈機は10数年後に市販され、普及が進んでいます。
2010年度からは、現在普及しているリモコン式草刈機につながる、傾斜40度の法面で人力作業の約2倍の能率で草刈り作業が可能な遠隔式小型畦畔除草ロボットの開発研究が、民間企業や大学と共同で実施されました。私は2014年度から2年間、研究代表者としてこの開発を支援しました(写真)。本開発機も実用化までに長期間を要し、開発初期から普及に向けた連携体制の構築が重要であることを痛感しました。

近年の技術進歩と普及状況
近年では技術の進歩により、水田内を自律的に移動して雑草の発生を抑制する抑草ロボットや、急傾斜地でも安全に作業できる多様なリモコン式草刈機が開発され、普及が進んでいます。これらの技術は単なる省力化にとどまらず、手取り除草作業などの重労働の軽減や、作業者が危険な場所に立ち入らなくてもよいという安全面での効果が大きいものです。特に草刈り作業中の転倒や飛び石事故は依然として発生しており、安全性向上への期待は極めて高いといえます。
今後の除草・草刈り作業のスマート技術開発の方向性
今後のスマート農業技術開発では、
-
自動走行や遠隔操作の高度化
-
AI・画像認識技術による雑草判別、除草適期診断技術の高精度化
-
自律作業の高度化、複数機械の協調作業
-
シェアリング等による低コスト化とメンテナンス性の向上
などが進むと考えられます。あわせて、スマート農業機械に適した栽培方式への変更、畦畔法面の植生転換、農地や農道の整備などインフラ整備を進める必要があります。これまでの研究開発、支援業務の経験から、優れた技術であっても農業者が導入しやすくなければ普及は進みません。技術開発と普及体制の両輪が重要です。
最後に繰り返しになりますが、農業経営の継続には生産技術の向上だけでなく、農業者の作業負担の軽減と安全確保が欠かせません。除草や草刈りといった日常的な管理作業こそ、スマート技術の効果が最も発揮される分野です。これまでの研究開発の蓄積を活かしながら、誰もが安全で効率的に農業を続けられる環境づくりに向けて、さらなる技術革新が期待されます。